1. 國家測繪產(chǎn)品質(zhì)量檢驗測試中心, 北京 100830;
2. 北京建筑大學(xué)測繪與城市空間信息學(xué)院, 北京 102616基金項目:國家自然科學(xué)基金青年基金項目(42104017);北京建筑大學(xué)"雙塔計劃"項目(JDYC20220825);北京建筑大學(xué)青年教師科研能力提升計劃(X21021)摘要:視覺SLAM技術(shù)是現(xiàn)代智能裝備環(huán)境感知的核心技術(shù)之一, 是驅(qū)動測繪向智能化方向發(fā)展的重要因素�。本文圍繞視覺SLAM環(huán)境感知技術(shù), 從特征點法、直接法、視覺指紋庫���、語義和類腦SLAM 5個方面, 梳理了30多年來典型視覺SLAM環(huán)境感知技術(shù)框架�����、重要算法基礎(chǔ)和測繪應(yīng)用方式; 總結(jié)分析了智能化時代視覺SLAM環(huán)境感知技術(shù)在智能化環(huán)境交互感知���、即時眾包化信息處理和多樣化感知數(shù)據(jù)服務(wù)3個方面的發(fā)展趨勢; 探討了視覺SLAM環(huán)境感知技術(shù)在交互式導(dǎo)航定位、數(shù)字孿生城市建設(shè)�����、實時地表監(jiān)測解譯�����、眾包地圖POI生產(chǎn)��、無人值守地質(zhì)災(zāi)害監(jiān)測和自主交互能力支持的深度空間探測應(yīng)用模式���。當(dāng)前, 測繪行業(yè)正處于重大發(fā)展變革時期, 視覺SLAM環(huán)境感知技術(shù)與人工智能技術(shù)的結(jié)合, 將會進一步賦能測繪生產(chǎn)方式的轉(zhuǎn)變, 提升智能化測繪生產(chǎn)和服務(wù)水平����。關(guān)鍵詞:視覺SLAM SLAM技術(shù)框架 環(huán)境感知 智能化測繪
SLAM技術(shù)作為一種即時匯集未知環(huán)境幾何�、拓?fù)?���、語義等信息的前沿科技,逐漸成為一種集導(dǎo)航定位���、地圖構(gòu)建�、目標(biāo)檢測和場景識別為一體的測繪技術(shù),在自動駕駛�����、智能機器人��、增強現(xiàn)實等領(lǐng)域發(fā)揮了重要作用[1-5]�,逐漸形成了以激光和相機為主的激光SLAM、視覺SLAM兩種技術(shù)模式����,其中前者起步早、發(fā)展相對成熟��,后者正處于快速發(fā)展與完善階段[6]����。通常情況下, 人類從外界獲得的信息約90%來自眼睛�����,而視覺SLAM具有類似特點����,可以從周邊環(huán)境中獲取海量��、冗余紋理等測繪要素���,并擁有優(yōu)異的場景辨別能力,配合其優(yōu)異的性價比��,受到諸多學(xué)者的青睞���。為此,本文重點圍繞視覺SLAM環(huán)境感知技術(shù)及其在測繪方面的應(yīng)用進行論述����。視覺SLAM環(huán)境感知技術(shù)是指搭載視覺傳感器的載體在沒有環(huán)境先驗信息的情況下����,在運動過程中建立環(huán)境模型��,同時估計載體運動[7-9],先后經(jīng)歷了傳統(tǒng)時代(1986—2004)��、算法分析時代(2004—2015)、穩(wěn)健性-預(yù)測性時代(2015至今) 3個發(fā)展階段[10],形成了VO(visual odometry)�、VIO(visual-inertial odometry)��、SLAM等典型算法模型,涌現(xiàn)出了適用于單目���、雙目�、RGB-D等多種傳感器的視覺SLAM環(huán)境感知技術(shù)路線�,促進了視覺SLAM環(huán)境感知技術(shù)在導(dǎo)航、定位和制圖等方面的快速發(fā)展��,并在自動駕駛�、航空攝影測量、地面移動測量�、信息提取與場景重建等測繪業(yè)務(wù)中的得到應(yīng)用[11-13]。當(dāng)今��,人類社會正逐漸向智能化時代邁進����。我國在《2019年政府工作報告》中將人工智能升級為“智能+”,美國����、歐盟等全球38個國家、地區(qū)制定了國家層面的人工智能戰(zhàn)略和政策��,推動了人工智能技術(shù)研究不斷走向深入����。隨著大數(shù)據(jù)���、人工智能、物聯(lián)網(wǎng)等新一代信息技術(shù)更新發(fā)展���,推動智能化測繪技術(shù)進步和事業(yè)轉(zhuǎn)型升級, 已成為測繪業(yè)界關(guān)心的熱門話題[14]���。視覺SLAM技術(shù)可以實時獲取位置、地圖���、紋理�����、語義和文字等環(huán)境信息��,成為環(huán)境感知的主要途徑之一�����,但如何通過新一代信息技術(shù)的加持�,深入探索基于視覺SLAM的環(huán)境感知“眼睛”、深度學(xué)習(xí)算法的“大腦”和眾包地理信息的“課堂教學(xué)”之間的耦合發(fā)展方式���,攻克基于視覺SLAM環(huán)境感知技術(shù)的地理信息環(huán)境感知、知識匯聚和智能化應(yīng)用技術(shù)�,進一步提高測繪生產(chǎn)力和生產(chǎn)要素的智能化水平,成為當(dāng)前亟待解決的技術(shù)難題����。為了深入探討基于視覺SLAM環(huán)境感知技術(shù)支持的智能化測繪發(fā)展,需要厘清視覺SLAM環(huán)境感知技術(shù)概念����、理論、技術(shù)發(fā)展動態(tài)���,以及當(dāng)前的測繪應(yīng)用特點���。為此,筆者分析了視覺SLAM環(huán)境感知技術(shù)的發(fā)展現(xiàn)狀��,探討了智能化時代的視覺SLAM環(huán)境感知技術(shù)發(fā)展方向�����,進而提出了智能化時代基于視覺SLAM環(huán)境感知技術(shù)的智能化測繪應(yīng)用模式�。1 視覺SLAM環(huán)境感知技術(shù)研究進展經(jīng)過30多年的發(fā)展����,視覺SLAM環(huán)境感知技術(shù)的理論框架已經(jīng)逐漸清晰�,包括前端、后端����、回環(huán)檢測和制圖4個主要的技術(shù)環(huán)節(jié)。前端的任務(wù)是估算相鄰圖像采集時相機的運動和計算局部地圖�;后端主要是基于回環(huán)檢測信息對圖像位姿和地圖信息進行優(yōu)化;回環(huán)檢測則是根據(jù)圖像信息識別已經(jīng)出現(xiàn)的場景或位置���,如果檢測到回環(huán)�����,然后把信息提供給后端進行處理����;制圖環(huán)節(jié)主要根據(jù)估計的軌跡�����,建立對應(yīng)的地圖[7]。近年來�,隨著4個主要環(huán)節(jié)技術(shù)的不斷發(fā)展變化,逐漸形成了以特征點法SLAM���、直接法SLAM���、視覺指紋庫SLAM�����、語義SLAM和類腦SLAM等為主體的視覺SLAM技術(shù)框架和算法模型��,并在智慧交通�、場景測繪、防災(zāi)減災(zāi)���、虛擬(增強)現(xiàn)實和智慧醫(yī)療等領(lǐng)域開展了產(chǎn)業(yè)化應(yīng)用探索�。表 1列舉了30多年來典型的實時視覺SLAM環(huán)境感知算法模型���。
表 1 典型視覺SLAM環(huán)境感知算法模型Tab. 1 Typical visual SLAM algorithm and its application
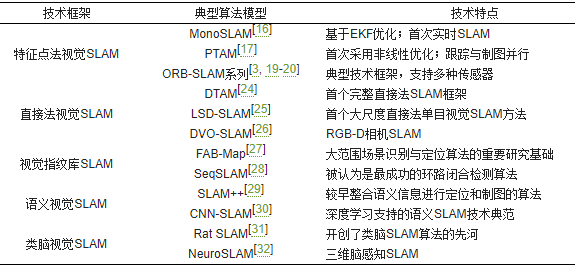
特征點法視覺SLAM技術(shù)是建立在圖像特征信息處理基礎(chǔ)上���,基于同名像點之間的最小歐氏距離或者像平面重投影誤差(reprojection error)最小化原理進行估算相鄰圖像間相機的運動、定位信息和構(gòu)建局部地圖的技術(shù)[7, 15],是視覺SLAM發(fā)展較早的一種方法�����。文獻(xiàn)[16]首次實現(xiàn)了基于濾波算法的實時SLAM技術(shù)��,文獻(xiàn)[17]發(fā)展了基于非線性優(yōu)化的多線程并行處理PTAM(parallel tracking and mapping)算法���。文獻(xiàn)[18]提出S-PTAM(stereo PTAM)算法���,將姿態(tài)估計與地圖構(gòu)建等并行處理。文獻(xiàn)[19]提出ORB-SLAM算法��,并經(jīng)過ORB-SLAM2[3]和ORB-SLAM3[20]算法的完善和提升���,發(fā)展成了一套適用單目���、雙目和RGB-D相機,且可實時處理的特征點法視覺SLAM技術(shù)框架�,在精度方面,ORB-SLAM2算法可以實現(xiàn)百米距離內(nèi)優(yōu)于1%的相對定位精度和0.21°的姿態(tài)測量精度[3]���。濾波和非線性優(yōu)化是早期兩種不同后端處理方式的技術(shù)框架��,前者計算效率高��,后者計算精度高�����,目前二者逐漸朝著相向的方向發(fā)展[21-22]���。隨著S-PTAM�、ORB-SLAM�����、ORB-SLAM2和ORB-SLAM3等特征點法典型模型的提出��,特征點法視覺SLAM的技術(shù)框架基本確定�����,其中ORB-SLAM系列憑借支持多種傳感器�����、優(yōu)異的計算性能和精度�����、有效的回環(huán)檢測算法和并行計算等特點����,成為特征點法視覺SLAM的基礎(chǔ)參考,圖 1展示了特征點法視覺SLAM的技術(shù)框架[3, 19-20, 23]���。
|
| Fig. 1 The technical framework of feature-based visual SLAM |
|
特征點法視覺SLAM技術(shù)是多種方法中研究時間較久�����,較為成熟的方案之一����,美國“機遇號”“勇氣號”和“好奇號”火星探測車����,以及中國的“月兔號”月球車采用光束法平差(bundle adjustment,BA)方法進行著陸過程中的位置和姿態(tài)解算���,支撐了探測車安全避障與路徑規(guī)劃所需的基礎(chǔ)地圖制作[33]��,而BA方法也是視覺SLAM位姿估計和圖優(yōu)化的重要方法之一��。文獻(xiàn)[34—35]實現(xiàn)了基于無人機視覺SLAM技術(shù)的DOM(數(shù)字正射影像)���、DSM(數(shù)字表面模型)和DEM(數(shù)字高程模型)等測繪產(chǎn)品的實時制作�。文獻(xiàn)[36]采用單目SLAM技術(shù)實時構(gòu)造不同高度的網(wǎng)格地圖��,為無人機平臺動態(tài)選擇合適的著陸區(qū)域���,為交互式路徑規(guī)劃技術(shù)提供了支撐��。由于受稀疏的紋理環(huán)境�����、復(fù)雜的光照和高動態(tài)場景影響比較嚴(yán)重,且在特征提取�����、描述和匹配等方面需要較大的計算資源����,特征點法視覺SLAM技術(shù)的產(chǎn)業(yè)應(yīng)用受到了一定限制,尤其是構(gòu)建稠密地圖受到影響更甚�����。
為了降低圖像特征處理時間和計算資源的消耗,直接法視覺SLAM技術(shù)應(yīng)運而生����。直接法視覺定位技術(shù)假設(shè)兩幀圖像中的匹配像素的灰度值不變�,構(gòu)建光度誤差函數(shù),基于圖像間光度誤差(photometric error)最小化原理進行位姿變化計算����。過程中僅需特征提取����,無須特征描述與匹配[37]����。相比于特征點法只能構(gòu)建稀疏點云地圖(構(gòu)建半稠密或稠密需要采取其他技巧),直接法可以利用圖像上全部像素信息����,具備構(gòu)建半稠密和稠密地圖的能力,在紋理稀疏場景具有一定優(yōu)勢���。直接法視覺SLAM是建立在圖像亮度一致性假設(shè)和光流法基礎(chǔ)上發(fā)展起來的�����。文獻(xiàn)[15, 24]提出了完整的直接法SLAM框架DTAM(dense tracking and mapping)�����,通過稠密��、亞像素和精確多視立體重建等進行軌跡跟蹤和三維模型重建���。LSD-SLAM(large scale direct SLAM)的問世��,成為第一個大尺度直接法單目視覺SLAM方法[25, 38]�����,利用圖像中像素梯度顯著的區(qū)域進行位姿跟蹤和深度重構(gòu)�����,可以恢復(fù)半稠密的三維場景地圖,文獻(xiàn)[38]將其拓展到雙目與大視角相機����,實現(xiàn)了手機端的AR應(yīng)用等其他功能�,成為了直接法中最具代表性的技術(shù)框架[39]���。文獻(xiàn)[26]在2013年基于圖像中全部像素光度誤差和深度誤差最小化原理提出了DVO-SLAM(dense visual odometry SLAM)算法框架���,定位精度可達(dá)0.19 m,成為了基于RGB-D相機進行視覺SLAM技術(shù)的基礎(chǔ)����。作為視覺SLAM的前端技術(shù),DSO(direct sparse odometry)視覺里程計出現(xiàn)和發(fā)展�,憑借良好的運算速度與跟蹤精度,將直接法視覺SLAM技術(shù)推向了一個新的高度[40-41]�����。文獻(xiàn)[40] 提出了半直接法(semi-direct monocular visual odometry�,SVO),利用直接法估計相機運動及特征點位置����,又對關(guān)鍵幀影像的路標(biāo)點進行了優(yōu)化,該方法可以獲得更精確�、穩(wěn)健和高效的結(jié)果,也被廣泛研究。圖 2展示了直接法視覺SLAM算法的技術(shù)框架����,不同于特征點法視覺SLAM技術(shù)的是前端和制圖兩部分內(nèi)容,其中前端主要基于圖像灰度信息進行位姿估計和跟蹤���,建圖部分半稠密和稠密地圖是直接法的特色和亮點����。
|
| Fig. 2 The brief technical framework of direct-based visual SLAM |
|
直接法視覺SLAM無須計算特征描述子��,結(jié)合像素梯度計算結(jié)果即可完成跟蹤和半稠密或稠密地圖的構(gòu)建��,對計算資源要求低���,消耗時間短����,成為近年來應(yīng)用研究的重點�。意大利Leonardo軍工公司在無人機軍用編隊項目中將LSD-SLAM(large-scale direct monocular SLAM)算法與無人機集成,開展障礙物識別工作[42]���。地平線公司采用StereoDSO算法進行稠密地圖重建���、3D環(huán)境感知與語義重建,研制了系列適用圖像處理的自動駕駛應(yīng)用芯片�,推動了視覺SLAM技術(shù)的智能化發(fā)展[43]。直接法SLAM由于存在圖像灰度一致性假設(shè)�、較小運動場景適用和圖像塊相關(guān)性計算等問題,在一定程度上限制了直接法SLAM的發(fā)展��,為此未來需要進一步地攻克上述問題�。
人類可以通過回憶判斷曾經(jīng)到達(dá)過的位置,而視覺指紋庫SLAM技術(shù)賦予了機器人構(gòu)建地圖和場景識別的能力��。該技術(shù)根據(jù)預(yù)先構(gòu)建的物理世界視覺指紋庫[44]與當(dāng)前位置的視覺詞袋模型進行匹配���,利用場景外觀概率識別算法�����,確定機器人位置��,并基于環(huán)境信息更新指紋庫�����。早期基于整體或者局部特征相似度的視覺指紋庫SLAM方法雖然得到了大量的研究和嘗試��,但是在應(yīng)用方面仍然存在較大的局限性����。文獻(xiàn)[45]提出了視覺詞袋模型(bag of words,BoW), 推動了基于BoW和回環(huán)檢測結(jié)合的視覺指紋庫SLAM技術(shù)得到快速發(fā)展����。文獻(xiàn)[27, 46]提出了FAB-MAP算法,其2.0版本的模型在1000 km的路線測試中被證明是一種成功的場景識別算法��,在100%的精度下�����,召回率為6.5%��,足以支持一個好的尺度SLAM系統(tǒng)���,成為了基于視覺指紋庫SLAM方法的城市或者更大尺度場景定位和建模的重要基礎(chǔ)�。圖 3展示了簡要的技術(shù)框架:首先對物理世界進行建模��,構(gòu)建物理世界的視覺指紋庫�����,也即先驗地圖;其次將感知的圖像信息轉(zhuǎn)換成視覺單詞���;然后計算視覺單詞與視覺指紋庫的相似度,進而實現(xiàn)位置確定����,并將物理世界的信息更新至視覺指紋庫中[27]。具有類似原理的視覺場景識別(visual place recognition, VPR)技術(shù)也是視覺指紋庫SLAM感知技術(shù)的一種重要形式�����,得到了廣泛的研究和應(yīng)用[47-48]�。
|
| Fig. 3 The technical framework of fingerprint-based visual SLAM |
|
視覺指紋庫SLAM技術(shù)屬于一種長時間序列、大空間尺度的視覺SLAM感知方法���。文獻(xiàn)[49]提出了SeqSLAM(sequence SLAM)算法��,即使存在因季節(jié)�、天氣����、晝夜變化等因素引起的極端環(huán)境變化導(dǎo)致基于特征的算法失敗時,該方法仍然能夠以100%的準(zhǔn)確率和60%的召回率實現(xiàn)軌跡匹配����,被認(rèn)為是最成功的環(huán)路閉合檢測算法�����。為了降低計算資源消耗和大型地圖的處理�����,文獻(xiàn)[50]提出了Fast-SeqSLAM算法�����,進一步降低了計算復(fù)雜度����,提高了計算效率�����。文獻(xiàn)[51]采用混合緊湊型神經(jīng)網(wǎng)絡(luò)模型進行視覺位置識別��,取得了比SeqSLAM更加優(yōu)異的結(jié)果�����。文獻(xiàn)[52]基于改進的VPR提出更具潛力的適用于自動駕駛需求的大范圍場景識別技術(shù)。當(dāng)前視覺指紋庫SLAM技術(shù)已經(jīng)解決了物理視覺的數(shù)據(jù)表達(dá)��、關(guān)聯(lián)和搜索等問題�,被廣泛應(yīng)用于大范圍場景的定位和識別,通過與無人機����、無人車����、無人潛航器等智能化裝備結(jié)合應(yīng)用[48],成為推動人工智能技術(shù)發(fā)展的重要因素����。
語義視覺SLAM是一種匯聚語義和SLAM技術(shù)的具有尺度、拓?fù)浜驼Z義地圖構(gòu)建功能為一體的視覺環(huán)境感知技術(shù)����,可以基于典型的SLAM技術(shù)結(jié)合物體類別�、目標(biāo)檢測����、語義分割等語義信息����,實現(xiàn)物理環(huán)境幾何�、拓?fù)浜驼Z義信息的獲取和地圖構(gòu)建,并用于導(dǎo)航定位等功能����,是當(dāng)前視覺SLAM領(lǐng)域的一個熱點研究方向[10, 53]。20世紀(jì)中葉美國心理學(xué)家E·C·托爾曼提出了認(rèn)知地圖(cognitive map)的概念�����,拉開了語義地圖相關(guān)技術(shù)研究的序幕,到了70年代語義地圖和機器人技術(shù)緊密結(jié)合起來[54]�����。然而,語義視覺SLAM則是近年來隨著典型SLAM技術(shù)發(fā)展而來的新技術(shù)[55]��。按照算法集成模式劃分,可以分為兩類處理方式���,一類是獨立的SLAM與目標(biāo)識別算法結(jié)合方式����。文獻(xiàn)[54]提出空間和語義結(jié)合,到文獻(xiàn)[29]提出的SLAM+ +算法,是比較早期整合語義信息進行定位和制圖的算法����,其中YOLO(you only look once)系列目標(biāo)識別算法被廣泛用于語義視覺SLAM技術(shù)研究[56-57]�。另一類是將語義與SLAM耦合處理的方式�。文獻(xiàn)[58]首次將幾何、語義和IMU(inertial measurement unit)信息統(tǒng)一到單個優(yōu)化框架中�,用語義信息輔助提高定位精度,取得比單目ORB-SLAM更加優(yōu)異的結(jié)果�����。按照模型中語義作用劃分���,可以分為服務(wù)于特征選擇算法,獲得對光照和視角變化穩(wěn)健性更好的特征點[59]�;服務(wù)于減弱圖像中動態(tài)物體影響,提高系統(tǒng)的穩(wěn)健性[60]��;服務(wù)于單目視覺SLAM尺度恢復(fù)[61]�����;服務(wù)于長時間序列定位[62]和定位精度提高[57]等方面。近年來隨著深度學(xué)習(xí)算法的發(fā)展��,如文獻(xiàn)[30]提出的CNN-SLAM(convolutional neural network SLAM)算法��,深度估計誤差低于真實值10%����,位姿估計精度優(yōu)于LSD-SLAM方法,推動了深度學(xué)習(xí)支持的語義視覺SLAM技術(shù)成為了研究熱點[63]�����。圖 4展示了語義視覺SLAM算法的技術(shù)框架�,包括跟蹤與位姿計算、地圖構(gòu)建�����、回環(huán)檢測和語義重建等部分[64]���。其中前3部分是傳統(tǒng)SLAM的技術(shù)框架�,語義重建部分通常結(jié)合本文歸納的兩種處理方式實現(xiàn)���。
|
| Fig. 4 The technical framework of semantic visual SLAM |
|
語義視覺SLAM環(huán)境感知技術(shù)目前處于快速發(fā)展的階段��,逐漸成為了推動智能裝備從被動規(guī)劃式環(huán)境感知技術(shù)向主動交互式環(huán)境感知技術(shù)發(fā)展的重要力量����。文獻(xiàn)[60]利用語義視覺SLAM技術(shù)在高動態(tài)環(huán)境中克服了傳統(tǒng)視覺SLAM技術(shù)靜態(tài)環(huán)境假設(shè)的應(yīng)用前提,提高了車輛導(dǎo)航時與動態(tài)環(huán)境的交互性���。文獻(xiàn)[65]開展了道路環(huán)境下的快速3D語義地圖構(gòu)建技術(shù)研究�,能夠識別道路�����、人行道���、墻體��、地形��、植被�、交通標(biāo)識和汽車等物體����。文獻(xiàn)[66]利用語義和粒子濾波技術(shù)自動構(gòu)建了城市場景車道級高精度地圖,伴隨該方向的深入研究��,相關(guān)成果可以為自動駕駛車輛提供地圖支撐����。文獻(xiàn)[67]詳細(xì)地描述了語義視覺SLAM環(huán)境感知技術(shù)在動態(tài)環(huán)境理解與制圖、靜態(tài)場景理解���、與人類和環(huán)境的交互��,以及機器人改善工作能力等方面的作用�,進一步為語義視覺SLAM環(huán)境感知技術(shù)的應(yīng)用拓展指明了方向�����。未來�����,隨著語義視覺SLAM技術(shù)在目標(biāo)檢測���、數(shù)據(jù)關(guān)聯(lián)準(zhǔn)確性方面的提高�,以及復(fù)雜算法與計算資源之間矛盾的優(yōu)化�����,將會進一步促進該技術(shù)在語義地圖、場景解譯���、高精度導(dǎo)航定位等領(lǐng)域的應(yīng)用����。
人類和動物在陌生環(huán)境的導(dǎo)航能力����,吸引了對類腦導(dǎo)航與空間認(rèn)知結(jié)合的仿生導(dǎo)航技術(shù)的不斷探索。隨著視覺SLAM技術(shù)的發(fā)展����,采用腦科學(xué)、人工智能有機結(jié)合的類腦視覺SLAM技術(shù)開始嶄露頭角�,成為近年來的研究熱點。類腦視覺SLAM指智能設(shè)備依靠視覺傳感器���,依賴大腦導(dǎo)航機制����,具有自主學(xué)習(xí)進化�、環(huán)境感知�����、認(rèn)知地圖構(gòu)建于一體的一種新型視覺SLAM技術(shù)方法[68]。自1971年O?Keefe和Dostrovsky發(fā)現(xiàn)嚙齒動物具有方向細(xì)胞和導(dǎo)航細(xì)胞��,到2014年O?Keefe等人發(fā)現(xiàn)“構(gòu)成大腦定位系統(tǒng)的細(xì)胞”獲得諾貝爾醫(yī)學(xué)獎����。研究發(fā)現(xiàn)哺乳動物海馬體中的“位置”細(xì)胞(place cell)、“網(wǎng)格”細(xì)胞(grid cell)��、“方向”細(xì)胞(head direction cell)�、“邊界”細(xì)胞(boundary vector cell)和“條紋”細(xì)胞(band cell)等是哺乳動物感知環(huán)境、構(gòu)建環(huán)境認(rèn)知地圖和導(dǎo)航的主要支撐[69]����。相關(guān)研究人員基于哺乳動物海馬體對環(huán)境的認(rèn)知和導(dǎo)航機理,提出了仿生導(dǎo)航概念����,類腦視覺SLAM技術(shù)逐漸開展起來[70]。文獻(xiàn)[31, 71—72]利用相關(guān)支撐條件�,提出RatSLAM算法模型,并不斷發(fā)展完善����,實現(xiàn)了2D郊區(qū)地圖繪制和超過2周時間的辦公環(huán)境導(dǎo)航功能��,開創(chuàng)了類腦SLAM算法的先河��,為眾多改進型算法模型的研究奠定了基礎(chǔ)���。文獻(xiàn)[70]基于3D網(wǎng)格細(xì)胞和方向細(xì)胞提出了適用3D環(huán)境下的NeuroSLAM算法,在大型�����、非結(jié)構(gòu)化���、不可預(yù)測的環(huán)境中推動了腦感知SLAM的進一步發(fā)展�。另外����,基于仿生眼技術(shù)的視覺SLAM解決方案,能夠在紋理稀疏環(huán)境主動搜索豐富的紋理環(huán)境����,提升視覺SLAM的穩(wěn)健性,也為類腦視覺SLAM提供一種新的解決方案[73]。圖 5展示了腦感知SLAM的簡要技術(shù)框架����,主要由4部分內(nèi)容組成。首先���,圖像預(yù)處理部分基于圖像信息進行圖像特征或視覺單詞提取、位姿估計和路徑整合等���;其次����,物體感知部分進行物體感知和閉環(huán)檢測���,服務(wù)于過往場景識別或新場景補充�����;然后�����,位置感知部分利用相關(guān)定位細(xì)胞進行位姿計算���;最后���,利用物體感知和位置感知的結(jié)果構(gòu)建具備環(huán)境拓?fù)浜途植慷攘康沫h(huán)境地圖,也即情景認(rèn)知地圖[32, 74]��。
|
| 圖 5 類腦視覺SLAM技術(shù)框架[74]Fig. 5 The technical framework of brain-like visual SLAM[74] |
|
作為新興的仿生導(dǎo)航技術(shù)�����,類腦視覺SLAM環(huán)境感知技術(shù)仍然處于發(fā)展的初級階段�,眾多學(xué)者圍繞定位、制圖等方面進行研究�,但是在賦予機器人自主交互能力和算法應(yīng)用等方面仍然面臨著較大的挑戰(zhàn)。隨著類腦視覺SLAM技術(shù)與傳感���、認(rèn)知��、學(xué)習(xí)和控制等技術(shù)的深度融合���,將會賦予下一代機器人智能感知、自我學(xué)習(xí)與認(rèn)知���、與人類和環(huán)境交互的能力[75]���,推動機器人環(huán)境感知技術(shù)更加擬人化[76]�����。制圖是視覺SLAM的重要功能之一�,圖 6展示了視覺SLAM方法可以形成的6種地圖形式�����。其中圖 6(a)��、(b)�、(c)是尺度地圖的3種表示形式��,也即根據(jù)地圖的稀疏程度精確地表示了地圖中物體的位置關(guān)系��;拓?fù)涞貓D不具備真實的物理尺寸��,只表示不同地點的連通關(guān)系和距離���,常用于路徑規(guī)劃和定位約束�;語義地圖是加標(biāo)簽的尺度地圖��,常用于人機交互,可提供目標(biāo)物體類型���、空間形態(tài)及位置等信息�;情景認(rèn)知地圖(cognitive maps of city)是人腦中再現(xiàn)的環(huán)境意象�����,由路徑��、標(biāo)志��、節(jié)點����、區(qū)域、邊界5個基本要素組成�����。上述地圖類型覆蓋了尺度�����、拓?fù)?��、語義等環(huán)境信息���,是測繪全息要素的重要組成部分����。
|
| Fig. 6 The map representation of visual SLAM |
|
綜上��,特征點法視覺SLAM發(fā)展較早���,相對成熟和完善��,但是受光照���、紋理等環(huán)境特征影響較大��;直接法視覺SLAM回避了特征點法中的特征處理環(huán)節(jié)���,在稠密地圖重建方面更具優(yōu)勢����,但是受到圖像灰度一致性假設(shè)的限制�����;視覺指紋庫SLAM借助詞袋模型優(yōu)勢,更加適應(yīng)大場景的應(yīng)用需求���,但需對物理世界預(yù)先建模���,且易受到季節(jié)、晝夜���、天氣等因素影響�;語義視覺SLAM技術(shù)���,立足上述算法���,引入了基于深度學(xué)習(xí)算法的環(huán)境語義提取,提升了對環(huán)境的理解和交互能力�����;類腦視覺SLAM采用仿生機理建立的一種新型SLAM方法�����,在擬人化方面具有較大的發(fā)展?jié)摿ΑH欢?���,面向智能化時代特點,單一的視覺SLAM方法難以滿足復(fù)雜的應(yīng)用需求�,而建立在新一代信息技術(shù)基礎(chǔ)之上的多種視覺SLAM方法融合更具發(fā)展優(yōu)勢。2 智能化時代視覺SLAM環(huán)境感知發(fā)展趨勢視覺SLAM技術(shù)對比激光SLAM技術(shù)具有成本低���、語義信息豐富�、可實時傳輸����,以及符合人類的感知習(xí)慣等特點[77],成為近年來的研究熱點�,通過與物聯(lián)網(wǎng)、5G��、云計算���、深度學(xué)習(xí)等技術(shù)的結(jié)合,將會進一步促進當(dāng)前的技術(shù)進步���,在智能化環(huán)境交互感知��、眾包化數(shù)據(jù)匯聚���、網(wǎng)絡(luò)化實時處理�、大數(shù)據(jù)知識服務(wù)和多樣化應(yīng)用等方面快速發(fā)展���,呈現(xiàn)出智能化時代視覺SLAM環(huán)境感知技術(shù)的新特點和新面貌�����。
隨著視覺SLAM技術(shù)與智能芯片�����、深度學(xué)習(xí)算法的融合不斷加深����,利用智能芯片和算法賦能視覺SLAM技術(shù)����,提升在環(huán)境感知、交互響應(yīng)等方面的智能化水平成為視覺SLAM技術(shù)的重要發(fā)展方向�。在環(huán)境感知方面,基于視覺SLAM幾何環(huán)境信息獲取手段����,深入研究基于深度學(xué)習(xí)算法支持的環(huán)境語義信息同步感知技術(shù)����,實現(xiàn)時空屬性與物體屬性同步認(rèn)知的功能�����;在交互響應(yīng)方面��,利用腦感知視覺SLAM����、語義視覺SLAM等主動性地判別場景物體,自主跟蹤有效目標(biāo)���,對環(huán)境觀測信息進行有效的綜合和取舍�����,并做出相應(yīng)的執(zhí)行動作�,推動現(xiàn)在的“眼觀六路”感知技術(shù)�����,向未來的“所見即所得”感知與交互融合方向發(fā)展�,即在觀測信息的支持下,對環(huán)境情況做出即時的理解和響應(yīng)����。
視頻作為一種流媒體數(shù)據(jù)[78],為視覺SLAM技術(shù)在即時��、眾包信息感知處理方面發(fā)展奠定了基礎(chǔ)�����。在即時信息處理方面����,研究視覺SLAM與互聯(lián)網(wǎng)、物聯(lián)網(wǎng)�、移動通信網(wǎng)等手段深度耦合方式,攻克基于即時通訊手段支撐的云-邊-端協(xié)同的位置��、制圖�、幾何、拓?fù)?�、語義等實時處理技術(shù),打造“感知-信息”聯(lián)動的在線應(yīng)用模式���,提升視覺SLAM技術(shù)的即時服務(wù)能力�;在眾包感知處理方面�,利用視覺SLAM的即時處理能力,攻克基于網(wǎng)聯(lián)汽車���、無人車���、無人機、機器人�、手機等設(shè)備云-機交互反饋的眾包信息處理技術(shù),滿足大眾化智能裝備在線導(dǎo)航����、定位、避障��、路徑規(guī)劃等需求��,同步構(gòu)建基于云端的測繪產(chǎn)品[79]����,打破傳統(tǒng)依賴專業(yè)團隊獲取與處理數(shù)據(jù)的局面,推動眾包化環(huán)境物聯(lián)感知技術(shù)發(fā)展,進一步地解放生產(chǎn)力�����,提高工作效率���。
2.3 多樣化感知數(shù)據(jù)服務(wù)
視頻蘊含著紋理、顏色���、幾何����、位置���、拓?fù)?���、語義��、POI(point of interest)等眾多信息�����,是測繪地理信息產(chǎn)品的重要構(gòu)成。通過培育視覺SLAM新型數(shù)據(jù)服務(wù)技術(shù)�,能夠為測繪行業(yè)發(fā)展提供新動能。通過研究視覺SLAM���、GNSS���、IMU、超聲波雷達(dá)等多模態(tài)集成算法����,有助于推動攻克自動駕駛領(lǐng)域及未知環(huán)境區(qū)域的導(dǎo)航定位、路徑規(guī)劃��、障礙物規(guī)避等難點�;探索基于視覺SLAM的DOM、DSM��、DEM和實景模型在線處理技術(shù)�,構(gòu)建新型遙感制圖和實景三維的服務(wù)模式,為應(yīng)急測繪等對時效性要求強的應(yīng)用場景提供支撐�����;攻克語義視覺SLAM技術(shù)支撐的眾包POI獲取�����、在線地表變化研判等技術(shù),支撐導(dǎo)航地圖更新和自然資源監(jiān)測等需求��。未來可以進一步利用大數(shù)據(jù)技術(shù)����,深入挖掘視覺SLAM環(huán)境感知成果中蘊藏的豐富地理信息�,有效發(fā)揮視頻數(shù)據(jù)的潛在價值。3 視覺SLAM智能化測繪應(yīng)用模式展望在新一代信息技術(shù)快速發(fā)展的形式下���,視覺SLAM環(huán)境感知技術(shù)將會不斷取得突破和進展�����,推動其與傳統(tǒng)測繪技術(shù)的深度融合����,有助于打造基于視覺SLAM環(huán)境感知技術(shù)的導(dǎo)航定位�、地圖制圖、實景三維���、遙感解譯等智能化測繪應(yīng)用模式��,促進傳統(tǒng)測繪服務(wù)方式向智慧化���、精準(zhǔn)化方向發(fā)展�。圖 7基于視覺SLAM技術(shù)在位置���、制圖和語義等方面的優(yōu)勢和發(fā)展延伸���,提出了6種測繪應(yīng)用方式。
|
| Fig. 7 Prospect of intelligent surveying and mapping application scenarios |
|
智能裝備通過集成視覺�����、激光���、超聲波等多種傳感器��,以及深度學(xué)習(xí)芯片等�,具備了較強的環(huán)境感知能力和一定的認(rèn)知能力�����,如大疆無人機采用視覺和超聲波組合進行避障等���。當(dāng)前視覺SLAM技術(shù)多以環(huán)境感知的方式使用��,隨著語義SLAM����、腦感知SLAM等技術(shù)的不斷發(fā)展,基于深度學(xué)習(xí)算法的視覺感知與SLAM技術(shù)不斷融合�,推動智能裝備朝著感知與自主決策方向發(fā)展,類似火星車自主判斷與選擇降落點����、自動駕駛車輛自動感知周圍靜態(tài)和動態(tài)的物體和屬性做出行動決策���、智能機器人根據(jù)環(huán)境信息自主決策下一步的行動計劃等����,基于視覺SLAM和深度學(xué)習(xí)算法的交互式導(dǎo)航定位技術(shù)將會得到進一步的發(fā)展���。
數(shù)字孿生城市建設(shè)是未來城市發(fā)展方向之一���,三維地理空間數(shù)據(jù)是數(shù)字孿生的基礎(chǔ)?;谝曈XSLAM的制圖和語義提取技術(shù)���,可以采用KinectFusion[80]、Openrealm[12]等算法對室內(nèi)外�、地上下空間及附屬設(shè)施構(gòu)建BIM/CIM(building/city information modeling)模型,并基于CNN-SLAM賦之真實的語義屬性���,實現(xiàn)現(xiàn)實世界與虛擬世界的精準(zhǔn)映射���。融合互聯(lián)網(wǎng)、物聯(lián)網(wǎng)�����、5G�����、人工智能���、區(qū)塊鏈等數(shù)字技術(shù)����,構(gòu)建城市智能運行的數(shù)字底座��,催生城市治理思維和方式的轉(zhuǎn)變與范式重塑。
視頻流從無人機����、視頻衛(wèi)星等平臺傳輸至地面或者云服務(wù)平臺,利用TerrainFusion[35]等視覺SLAM技術(shù)獲取實時的DOM��、DEM����、DSM等測繪產(chǎn)品。利用云-邊-端等跨終端協(xié)同處理技術(shù)����,結(jié)合深度學(xué)習(xí)、遷移學(xué)習(xí)�、強化學(xué)習(xí)等多種智能計算模型和專家經(jīng)驗�,開展地表空間遙感數(shù)據(jù)要素智能提取、“數(shù)據(jù)-模型-知識”驅(qū)動的地表要素智能解譯�、自然資源要素畫像和圖譜構(gòu)建技術(shù),實現(xiàn)自然資源要素��、場景��、知識的快速智能提取和表達(dá)[81]����,推動傳統(tǒng)數(shù)據(jù)服務(wù)向知識服務(wù)的轉(zhuǎn)變���,服務(wù)于國土普查與動態(tài)監(jiān)測等業(yè)務(wù)[82]。
視覺感知技術(shù)是地圖POI數(shù)據(jù)獲取的主要手段之一�����,基于深度學(xué)習(xí)算法支持的語義視覺SLAM�����、詞袋模型等技術(shù)���,可與高德等廠商的STR(自然場景文字識別)技術(shù)結(jié)合���,實現(xiàn)實時獲取地圖POI數(shù)據(jù)。通過智能手機����、智能網(wǎng)聯(lián)汽車等在使用過程中的視覺傳感器采集到的圖像、位置等數(shù)據(jù)��,通過5G等通訊網(wǎng)絡(luò)傳輸?shù)胶蠖嗽破脚_,可以實時的轉(zhuǎn)換為POI數(shù)據(jù)����,推動地圖POI數(shù)據(jù)感知的眾包化,革新地圖POI數(shù)據(jù)獲取的技術(shù)方法��,打破專業(yè)人員人機交互獲取的模式����,提升地圖POI數(shù)據(jù)獲取的智能化、實時化程度����。
3.5 無人值守地質(zhì)災(zāi)害監(jiān)測
艱險山區(qū)崩滑地質(zhì)災(zāi)害突發(fā)性強、危害性大��,基于GNSS變形監(jiān)測技術(shù)對地質(zhì)災(zāi)害監(jiān)測的實景展示稍顯不足��?;贠penrealm等視覺SLAM與設(shè)備自動換/充電、無人值守[83]等技術(shù)的發(fā)展與融合�,無人機遙感監(jiān)測系統(tǒng)可以根據(jù)GNSS等預(yù)警預(yù)報信息聯(lián)動自主觀測災(zāi)害體�,并實時回傳數(shù)據(jù)構(gòu)建災(zāi)害體實景三維模型,且可以利用視覺感知技術(shù)規(guī)避三維空間的障礙物�����,保障飛行安全,實現(xiàn)地質(zhì)災(zāi)害的無人機值守監(jiān)測與孿生展示�。
面向深空、深海�、深地等深度空間的探索已成為人類科技競爭的焦點之一,針對陌生甚至未知的深度空間�����,類似祝融號火星車��、玉兔號月球車[33]等智能裝備對其環(huán)境感知����、深度交互和主動決策能力的需求愈發(fā)凸顯。利用視覺SLAM的導(dǎo)航���、定位�����、制圖和語義等技術(shù)可以實現(xiàn)對深度空間地形��、地貌獲取����,以及場景和空間要素的識別與解譯,并可解決探索過程中的障礙物檢測與規(guī)避等問題���,提高智能裝備在深度空間探測過程中的自主性�。隨著智能化����、云計算、大數(shù)據(jù)時代的來臨���,測繪行業(yè)面臨著重要的轉(zhuǎn)型升級的發(fā)展機遇�����,對測繪裝備����、數(shù)據(jù)感知和數(shù)據(jù)應(yīng)用模式的發(fā)展提出了更高的要求�����。視覺SLAM環(huán)境感知技術(shù)經(jīng)過30多年的快速發(fā)展����,在定位技術(shù)方面形成了多種穩(wěn)健、可靠的技術(shù)框架����、算法模型和測繪應(yīng)用工藝,在大場景制圖����、語義和類腦技術(shù)支持的交互式主動服務(wù)等方面取得了較大突破和進展。隨著視覺SLAM環(huán)境感知技術(shù)與人工智能�����、深度學(xué)習(xí)���、大數(shù)據(jù)���、云-邊-端計算等技術(shù)的深度交叉發(fā)展,將會推動視覺SLAM環(huán)境感知技術(shù)朝著智能化�����、眾包化�����、即時化等方向快速發(fā)展,進一步推動測繪生產(chǎn)方式和生產(chǎn)力的變革與提升����。位置、幾何�、拓?fù)洹⒄Z義等信息是賦能未來測繪業(yè)務(wù)智能化發(fā)展的重要基礎(chǔ)���,在當(dāng)前的新發(fā)展格局下��,單一的視覺SLAM方法存在巨大應(yīng)用挑戰(zhàn)����,需要與新一代信息技術(shù)融合發(fā)展���,研究與完善復(fù)雜場景多方法融合的視覺SLAM環(huán)境感知技術(shù)理論�、算法框架�����,突破實時主動環(huán)境感知���、場景深度交互自主導(dǎo)航與路徑規(guī)劃�����、全息要素地圖構(gòu)建與要素識別等關(guān)鍵技術(shù)�,打造基于行業(yè)與大眾結(jié)合的開放�、創(chuàng)新測繪技術(shù)服務(wù)模式,滿足新形勢下的測繪應(yīng)用需求��。第一作者簡介:張繼賢(1965-), 男, 博士, 研究員, 研究方向為攝影測量與遙感����、地理信息系統(tǒng)、資源與環(huán)境遙感監(jiān)測����。E-mail: zhangjx@casm.ac.cn通信作者:劉飛, E-mail:pntrc@cumt.edu.cn

 京公網(wǎng)安備 11010802031220號
京公網(wǎng)安備 11010802031220號